Abstract
Image denoisers have been shown to be powerful priors for solving inverse problems in imaging. In this work, we introduce a generalization of these methods that allows any image restoration network to beused as an implicit prior. The proposed method uses priors specified by deep neural networks pre-trained as general restoration operators. The method provides a principled approach for adapting state-of-the-art restoration models for other inverse problems. Our theoretical result analyzes its convergence to a stationary point of a global functional associated with the restoration operator. Numerical results showthat the method using a super-resolution prior achieves state-of-the-art performance both quantitatively and qualitatively. Overall, this work offers a step forward for solving inverse problems by enabling the use of powerful pre-trained restoration models as priors.
DRP for Image Deblurring
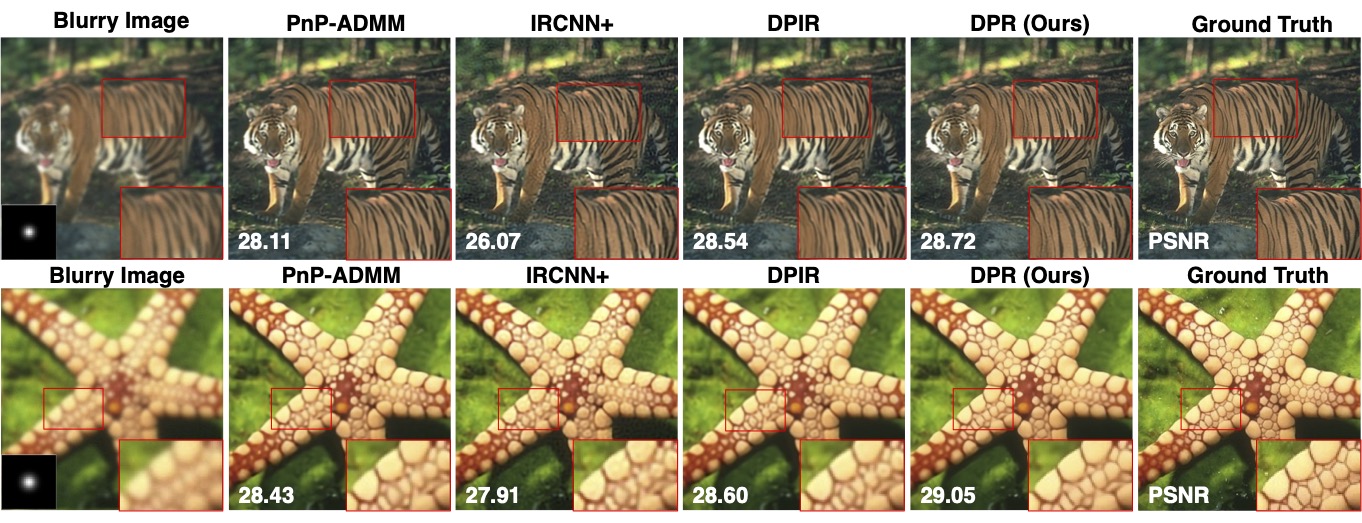
Figure 1: Visual comparison of DRP with several well-known methods on Gaussian deblurring of color images. Note how DRP using restoration prior improves over SOTA methods based on denoiser priors.
DRP for Single Image Super Resolution
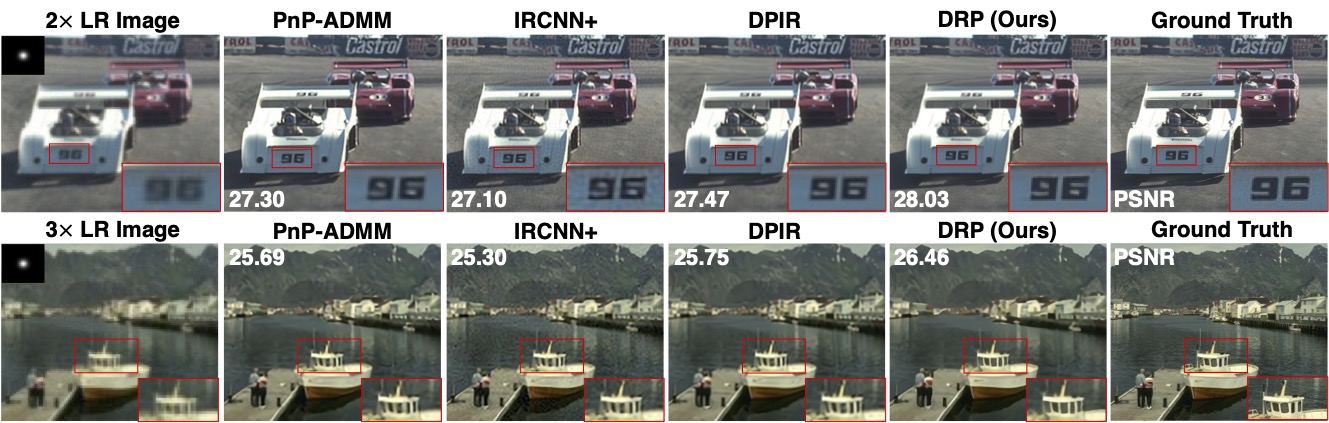
Figure 2: Visual comparison of DRP and several well-known methods on single image super resolution. Note the excellent performance of the proposed DRP method using the SwinIR prior both visually and in terms of PSNR.
Convergence Behaviour of DRP
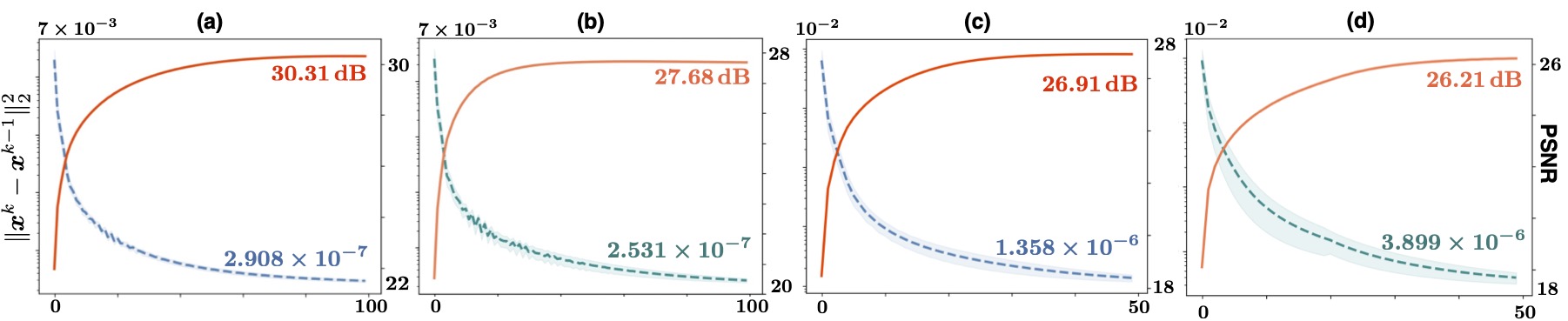
Figure 3: llustration of the convergence behaviour of DRP for image deblurring and single image superresolution on the Set3c dataset. (a)-(b): Deblurring with Gaussian blur kernels of standard deviations 1.6 and 2.0. (c)-(d):2× and 3× super resolution with the Gaussian blur kernel of standard deviation 2.0.
Illustration of the Prior Refinement Strategy
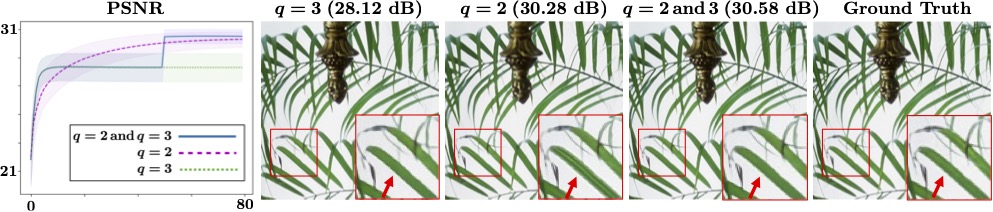
Figure 4: Illustration of the impact of different SR factors in the prior used within DRP for image deblurring. We show three scenarios: (i) using only 3× prior, (ii) using only 2× prior, and (iii) the use of the prior refinement strategy, which combines both the 2× and 3× priors. Left: Convergence of PSNR against the iteration number for all three configurations. Right: Visual illustration of the final image for each setting. The visual difference is highlighted by the red arrow in the zoom-in box. Note how the reduction of q can lead to about 0.3 dB improvement in the final performance.
DRP for Image Denoising
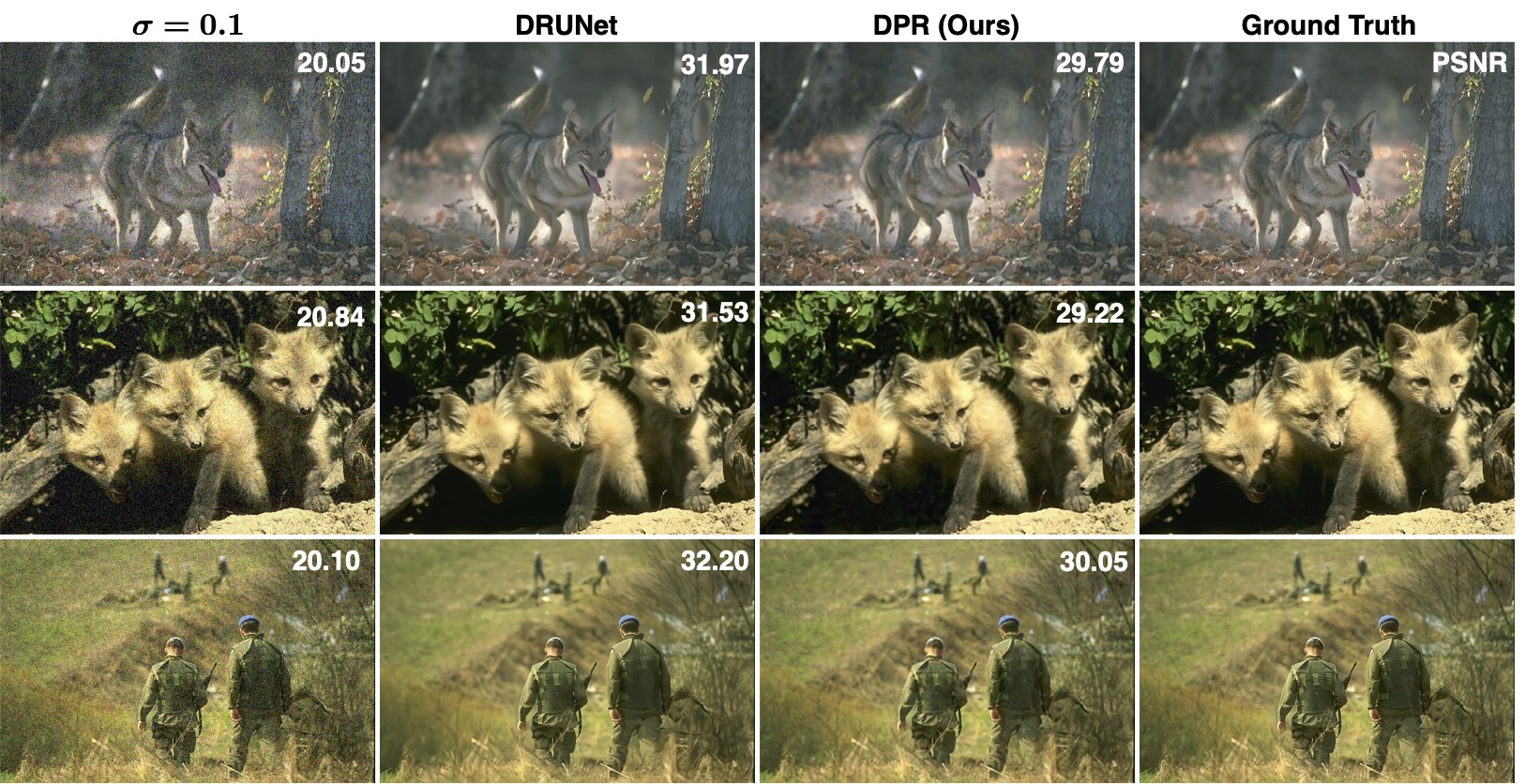
Figure 6: llustration of denoising results of DRP on CBSD68 dataset with noise level σ= 0.1. Each image is labeled by its PSNR (dB) with respect to the original image.
Paper
